在工業(yè)制造與建筑領(lǐng)域,不銹鋼制品因其卓越的耐腐蝕性、高強(qiáng)度和長久的使用壽命,已成為不可或缺的關(guān)鍵材料。上海潤興不銹鋼制品經(jīng)營部,作為一家專注于不銹鋼制品供應(yīng)的專業(yè)企業(yè),憑借多年的行業(yè)深耕,已發(fā)展成為華東地區(qū)重要的不銹鋼產(chǎn)品供應(yīng)商之一,主營產(chǎn)品涵蓋不銹鋼螺絲、各類不銹鋼材料及不銹鋼水箱,為客戶提供一站式、高品質(zhì)的產(chǎn)品解決方案。
核心業(yè)務(wù):三大支柱,全面覆蓋
- 不銹鋼螺絲系列:上海潤興經(jīng)營部提供全系列的不銹鋼螺絲產(chǎn)品,包括但不限于內(nèi)六角螺絲、外六角螺栓、馬車螺絲、膨脹螺絲、自攻螺絲等。產(chǎn)品嚴(yán)格按照國家標(biāo)準(zhǔn)(GB)或國際標(biāo)準(zhǔn)(如DIN、ANSI)生產(chǎn),材質(zhì)主要采用304、316等優(yōu)質(zhì)不銹鋼,確保在潮濕、酸堿等惡劣環(huán)境下依然保持優(yōu)異的機(jī)械性能和防銹能力。無論是機(jī)械設(shè)備裝配、鋼結(jié)構(gòu)緊固,還是戶外設(shè)施安裝,都能提供可靠、耐用的連接方案。
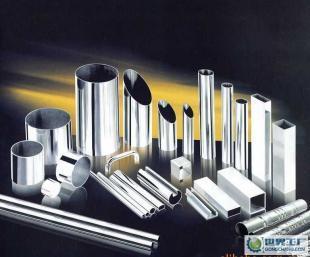
- 不銹鋼材料供應(yīng):除了標(biāo)準(zhǔn)緊固件,經(jīng)營部還提供多種規(guī)格和形態(tài)的不銹鋼原材料。包括不同厚度和尺寸的不銹鋼板、不銹鋼卷、不銹鋼管(無縫管、焊管)、不銹鋼棒材(圓棒、方棒、六角棒)以及不銹鋼型材等。材料牌號齊全,可滿足客戶在鈑金加工、結(jié)構(gòu)件制造、管道工程、裝飾工程等不同領(lǐng)域的定制化需求。專業(yè)的切割、分條等服務(wù),能有效幫助客戶減少加工環(huán)節(jié),降低成本。
- 不銹鋼水箱定制:不銹鋼水箱是經(jīng)營部的另一項(xiàng)重點(diǎn)業(yè)務(wù)。產(chǎn)品廣泛應(yīng)用于住宅、酒店、學(xué)校、醫(yī)院、工廠的生活用水、消防用水及工業(yè)用水的儲存。上海潤興提供從設(shè)計(jì)、生產(chǎn)到安裝的一體化服務(wù)。水箱采用食品級304不銹鋼板沖壓成型,模塊化拼裝,具有強(qiáng)度高、密封性好、清潔衛(wèi)生、抗腐蝕、免維護(hù)等優(yōu)點(diǎn)。可根據(jù)客戶現(xiàn)場空間和容量要求進(jìn)行非標(biāo)定制,確保每一套水箱都安全、合規(guī)、高效。
專業(yè)優(yōu)勢與服務(wù)承諾
- 品質(zhì)保證:所有產(chǎn)品均源自正規(guī)大型鋼廠或信譽(yù)良好的生產(chǎn)商,提供材質(zhì)證明,從源頭把控質(zhì)量。
- 庫存充足:常規(guī)規(guī)格產(chǎn)品備有現(xiàn)貨,能夠快速響應(yīng)客戶的緊急需求,減少項(xiàng)目等待時(shí)間。
- 技術(shù)咨詢:擁有經(jīng)驗(yàn)豐富的團(tuán)隊(duì),可為客戶提供產(chǎn)品選型、技術(shù)標(biāo)準(zhǔn)、應(yīng)用方案等方面的專業(yè)建議。
- 靈活交易:支持批發(fā)、零售及定制加工,服務(wù)對象涵蓋工程承包商、制造企業(yè)、貿(mào)易公司及個(gè)體客戶。
上海潤興不銹鋼制品經(jīng)營部立足于上海這一經(jīng)濟(jì)與工業(yè)中心,始終堅(jiān)持以客戶需求為導(dǎo)向,以產(chǎn)品質(zhì)量為根本。通過持續(xù)優(yōu)化產(chǎn)品結(jié)構(gòu)與服務(wù)體系,致力于成為客戶最值得信賴的不銹鋼產(chǎn)品合作伙伴。無論是需要一顆小小的螺絲,還是整套大型儲水系統(tǒng),潤興都能提供堅(jiān)實(shí)可靠的支持,為各類工程項(xiàng)目和工業(yè)生產(chǎn)保駕護(hù)航。